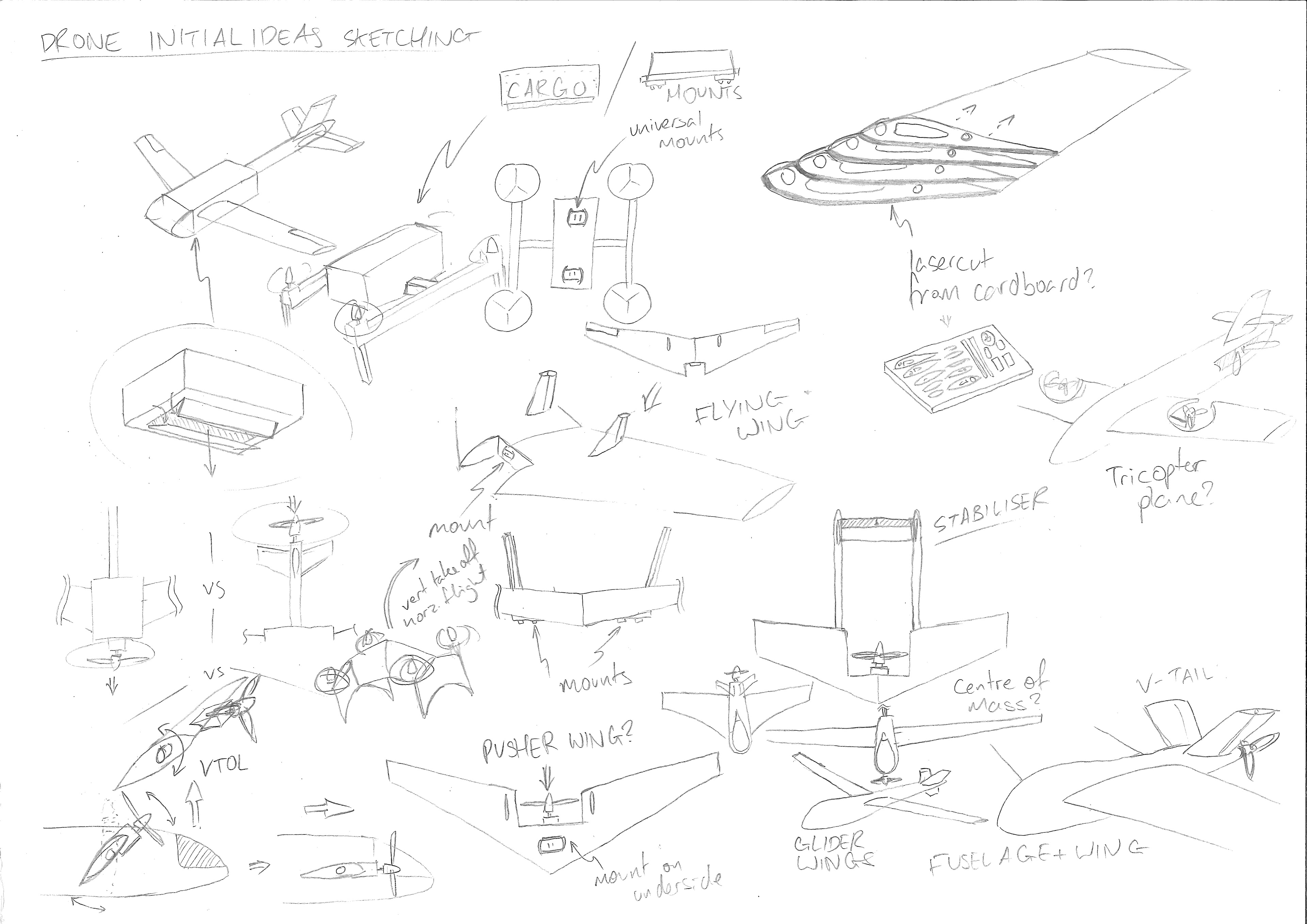
For my A-Level Design Engineering project (2018-2019), I designed a net for a modular drone system which could be very cheaply cut out of foamboard using a basic laser cutter and folded into shape by an inexperienced client in around 2 hours. I kept in contact with several stakeholders in the fields of aircraft crash investigation, coastal degradation monitoring, construction, and a hobbyist, all of whom could see potential in the drone for their own needs by utilizing different attachments.
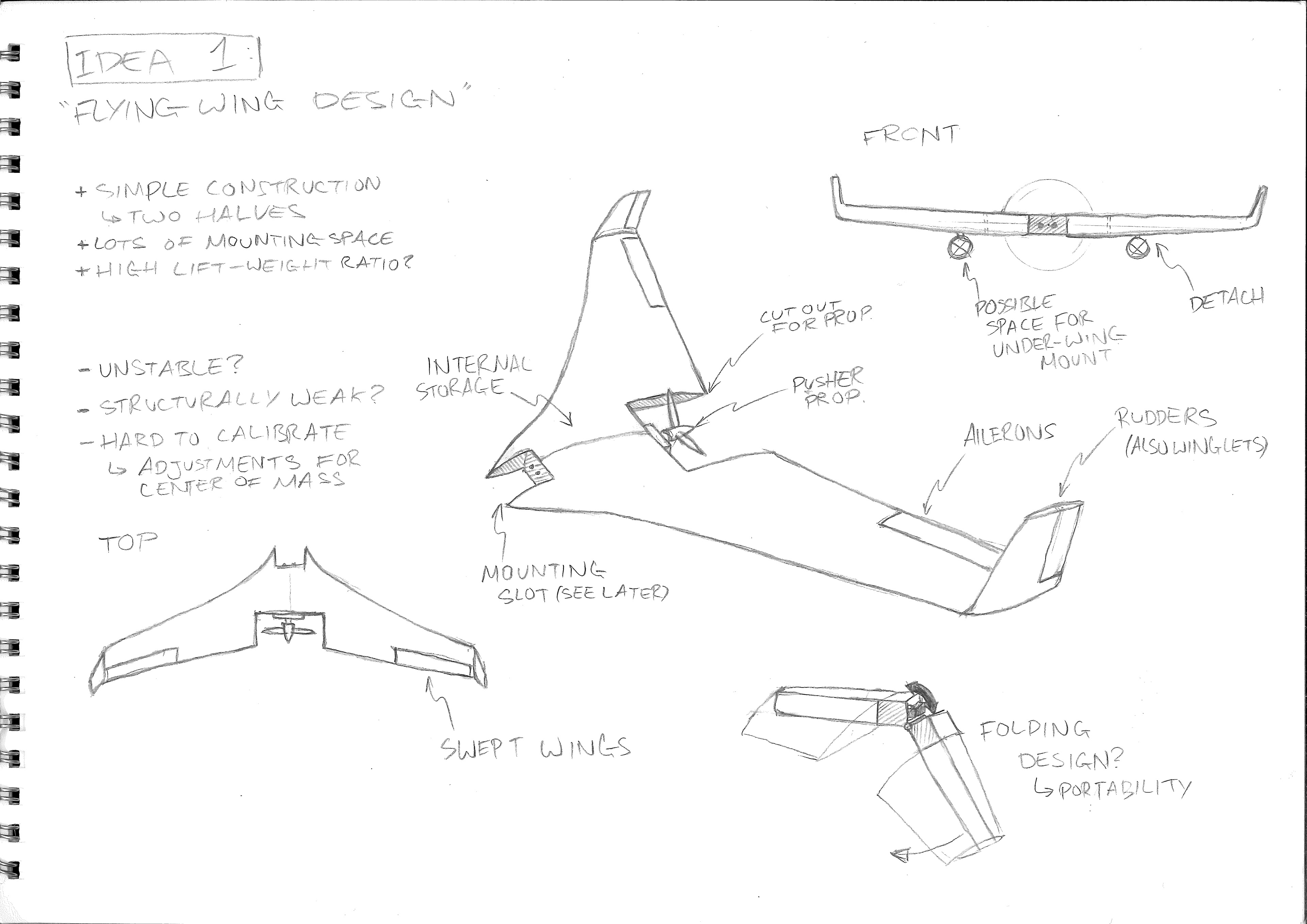
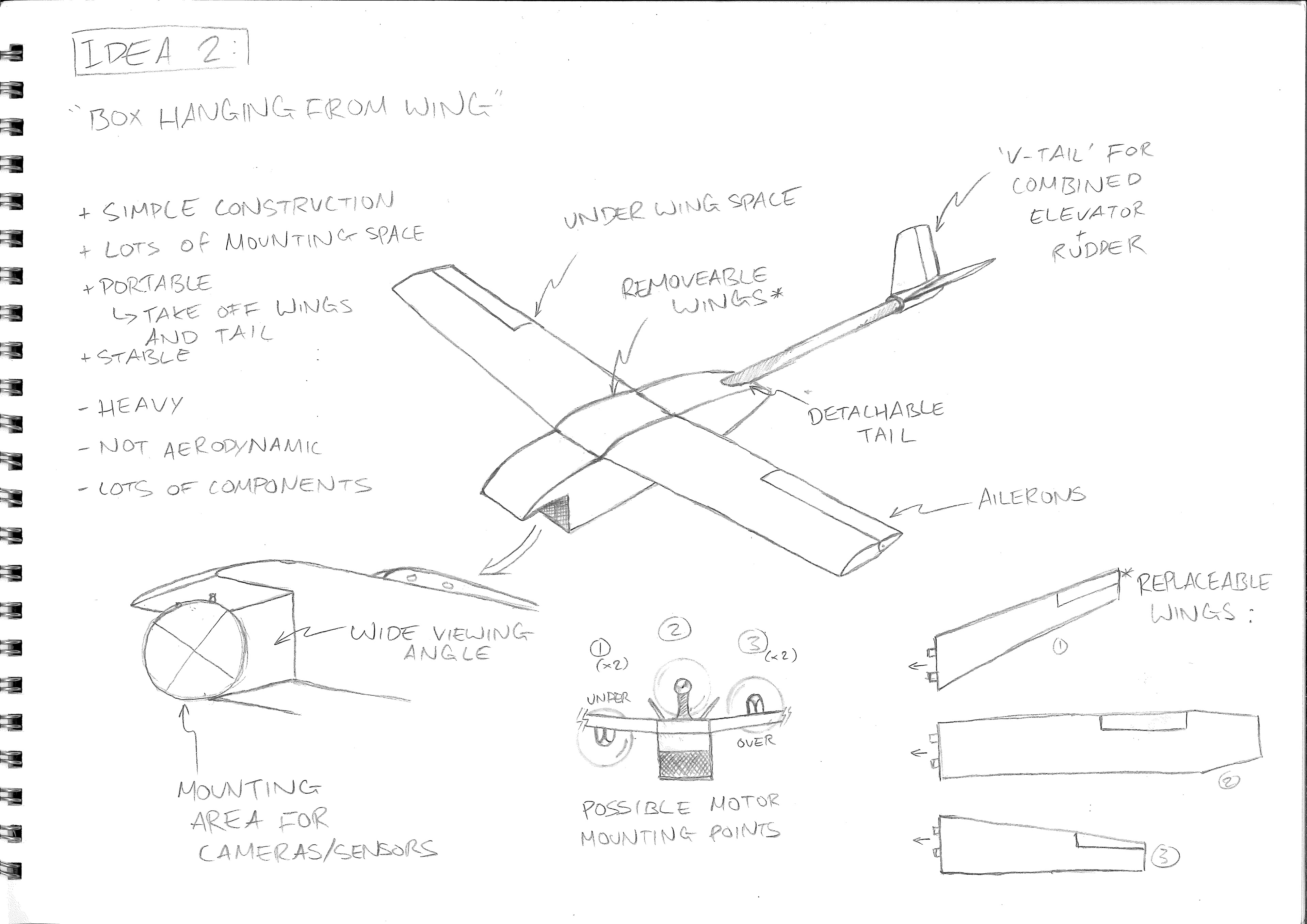
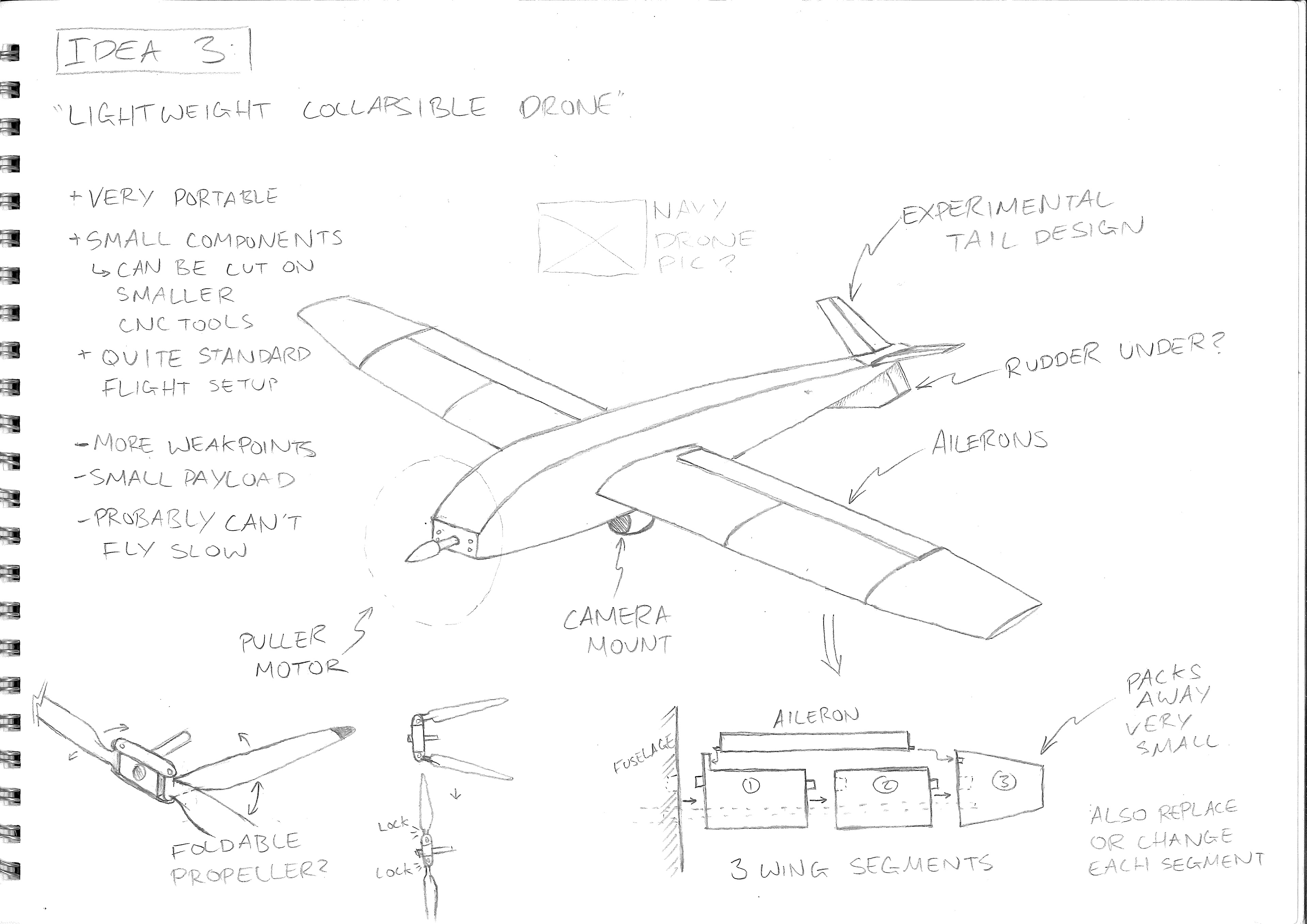
Ideation and sketching
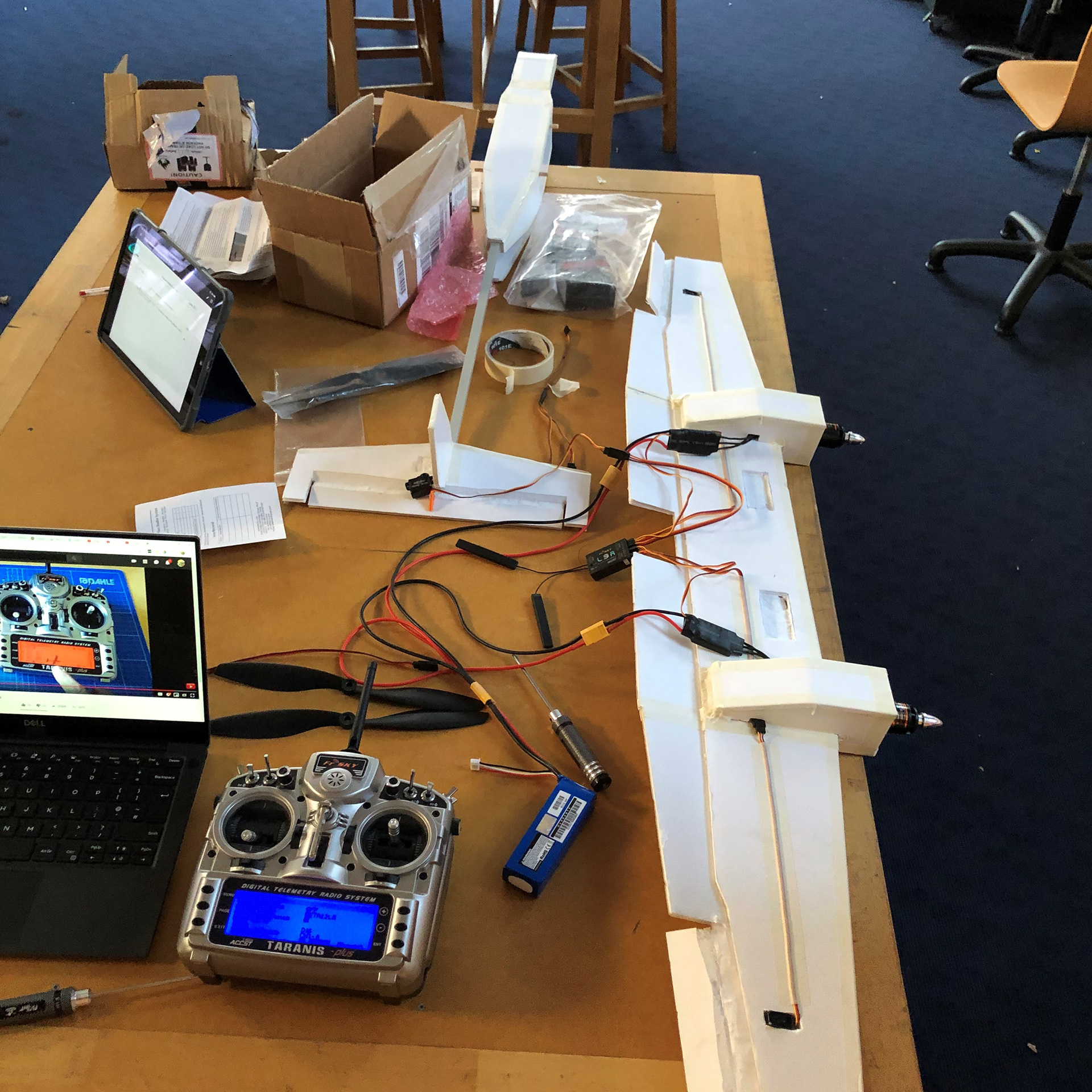
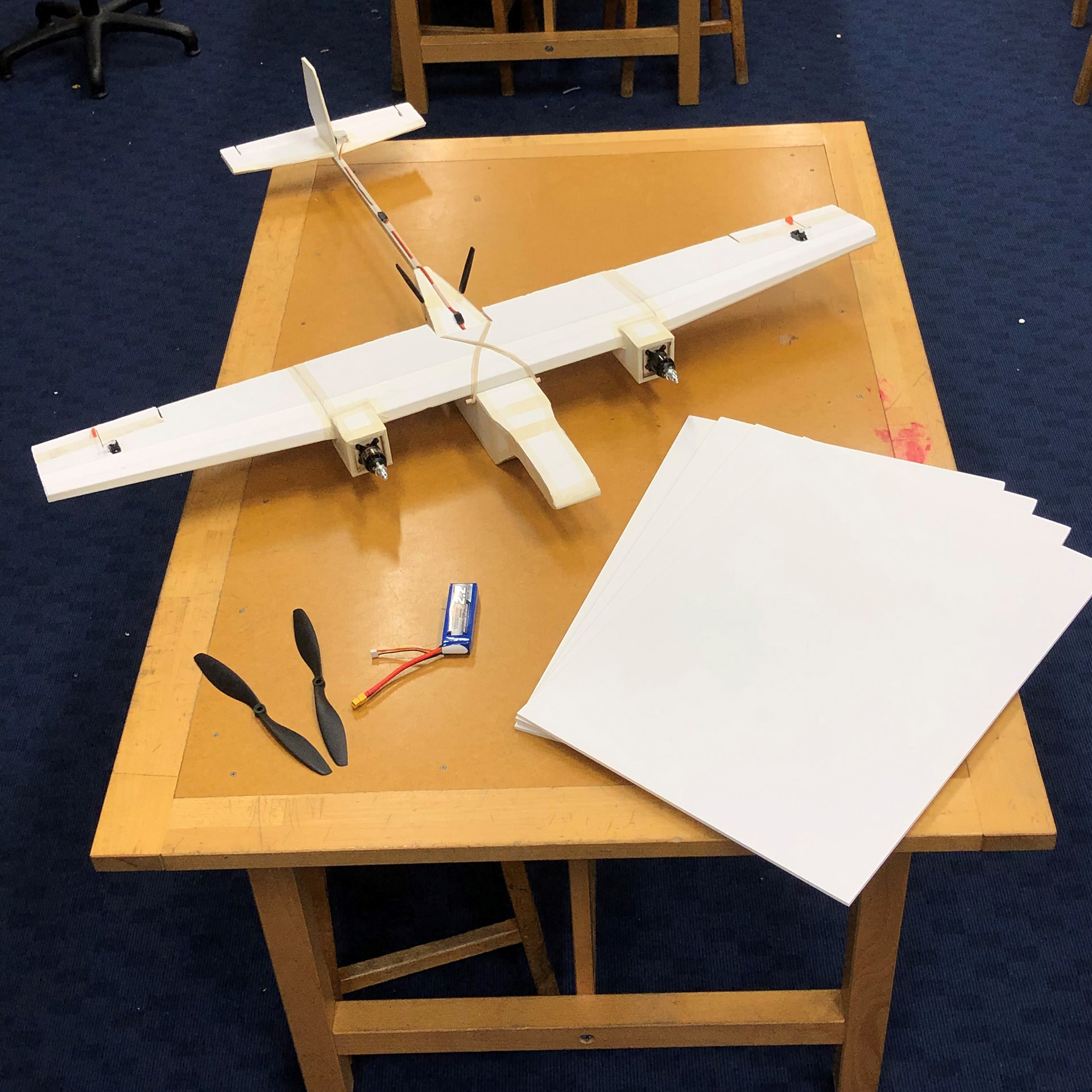
Prototyping
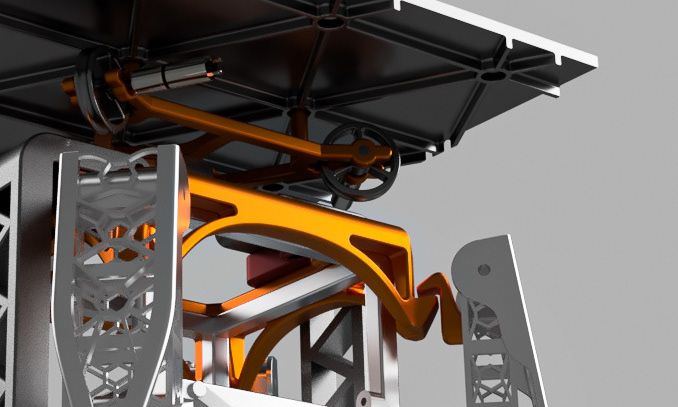
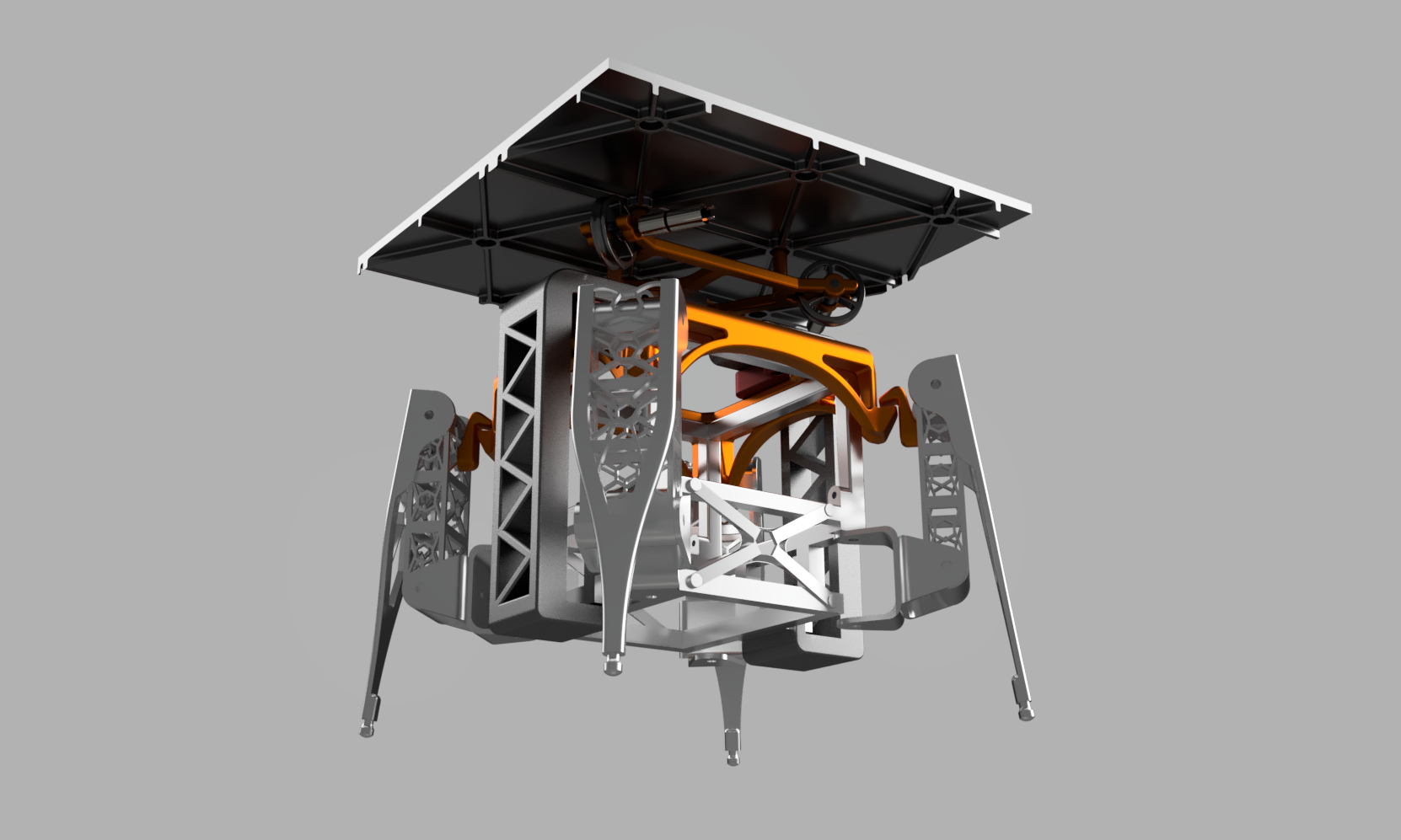
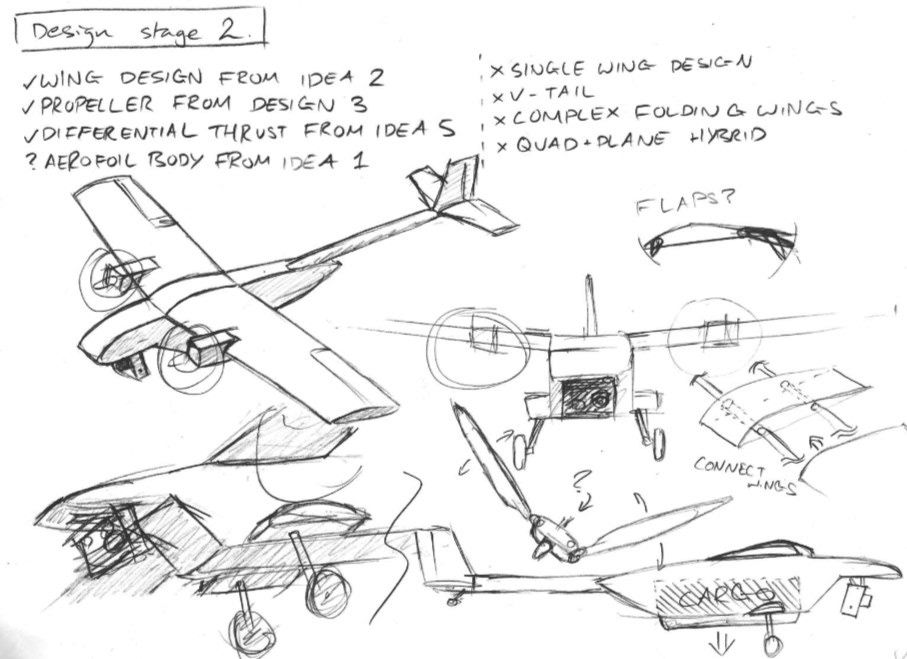
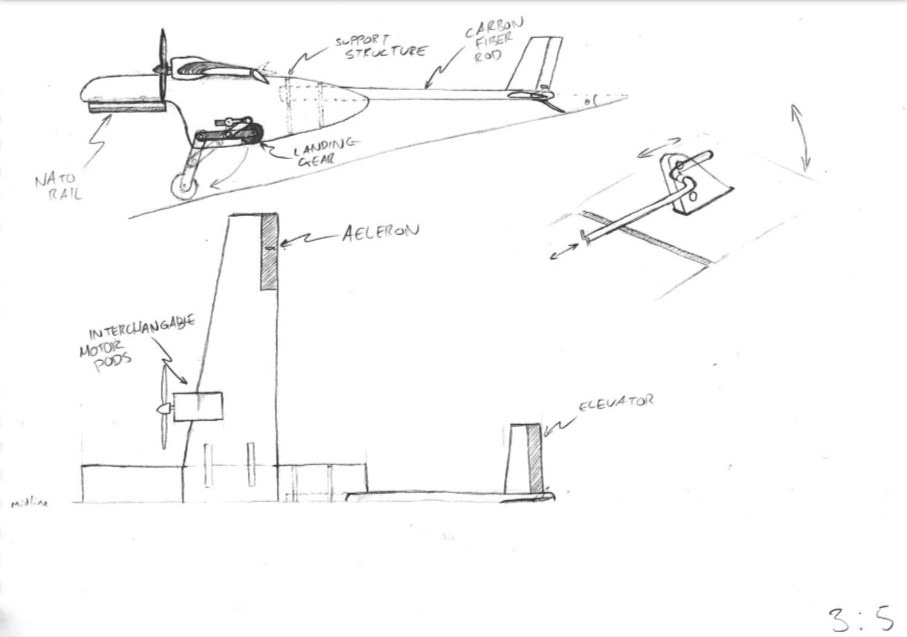
In order to make the product system work internationally, I made sure to only use components that could be easily obtained anywhere. Standard servos can be cheaply and easily acquired, so all of the actuation points were designed to work with them. I experimented with leading-edge / trailing-edge flaps and folding landing gear by making these lo-fi prototypes, but later decided that these added unnecessary weight and complexity.
Electronics
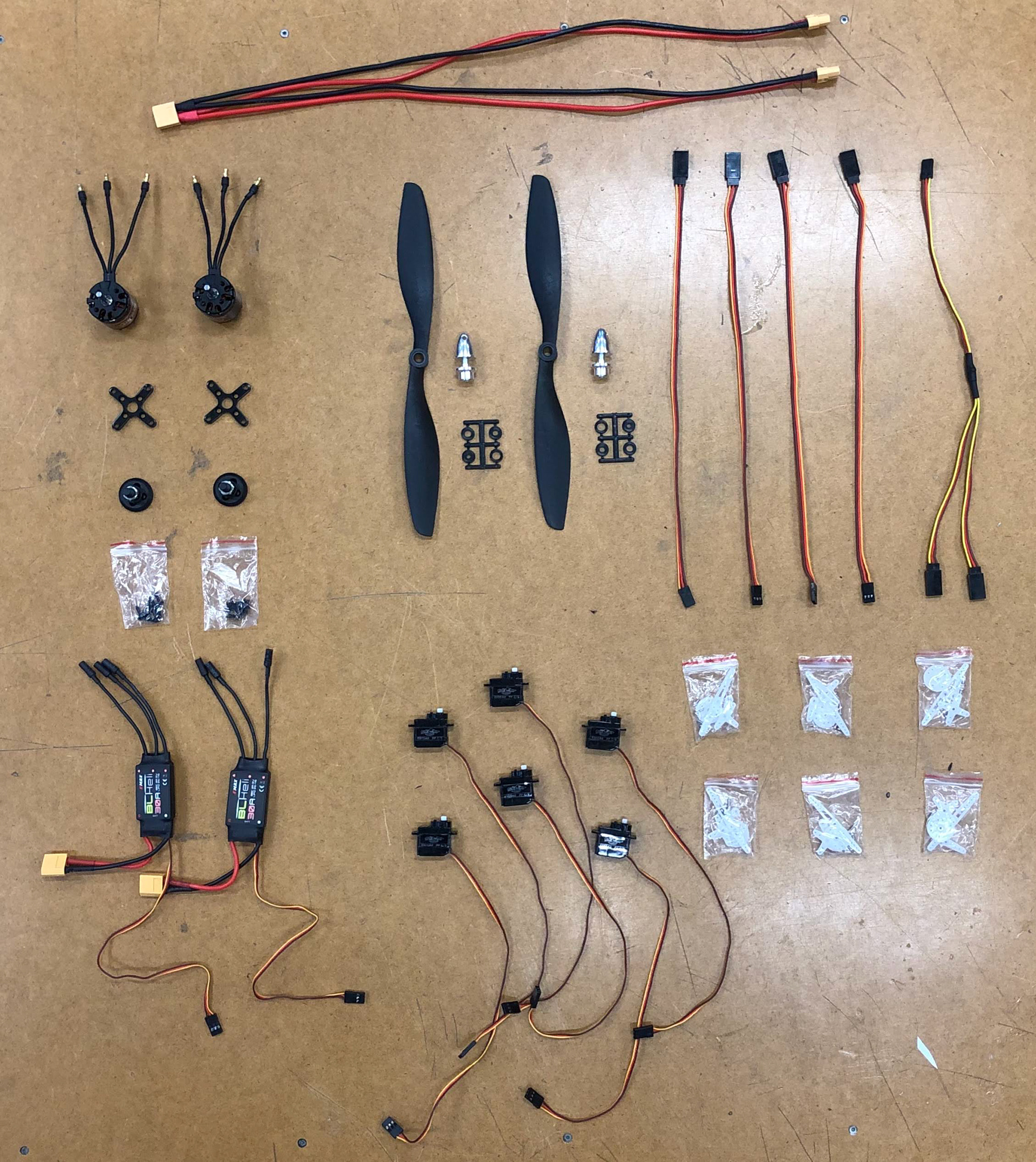
I was able to buy a kit with most of the components needed to make a drone with differential thrust. I sourced the appropriate ESCs and radio kit, and added an IMU, gyro stabilization and a flight controller to complete the build. I used open-sourced software to try to implement basic autopilot, but never got this feature to fully function.
(Note that one of the propellers the wrong orientation. This was a mistake from the suppliers and was corrected later)
Complete build
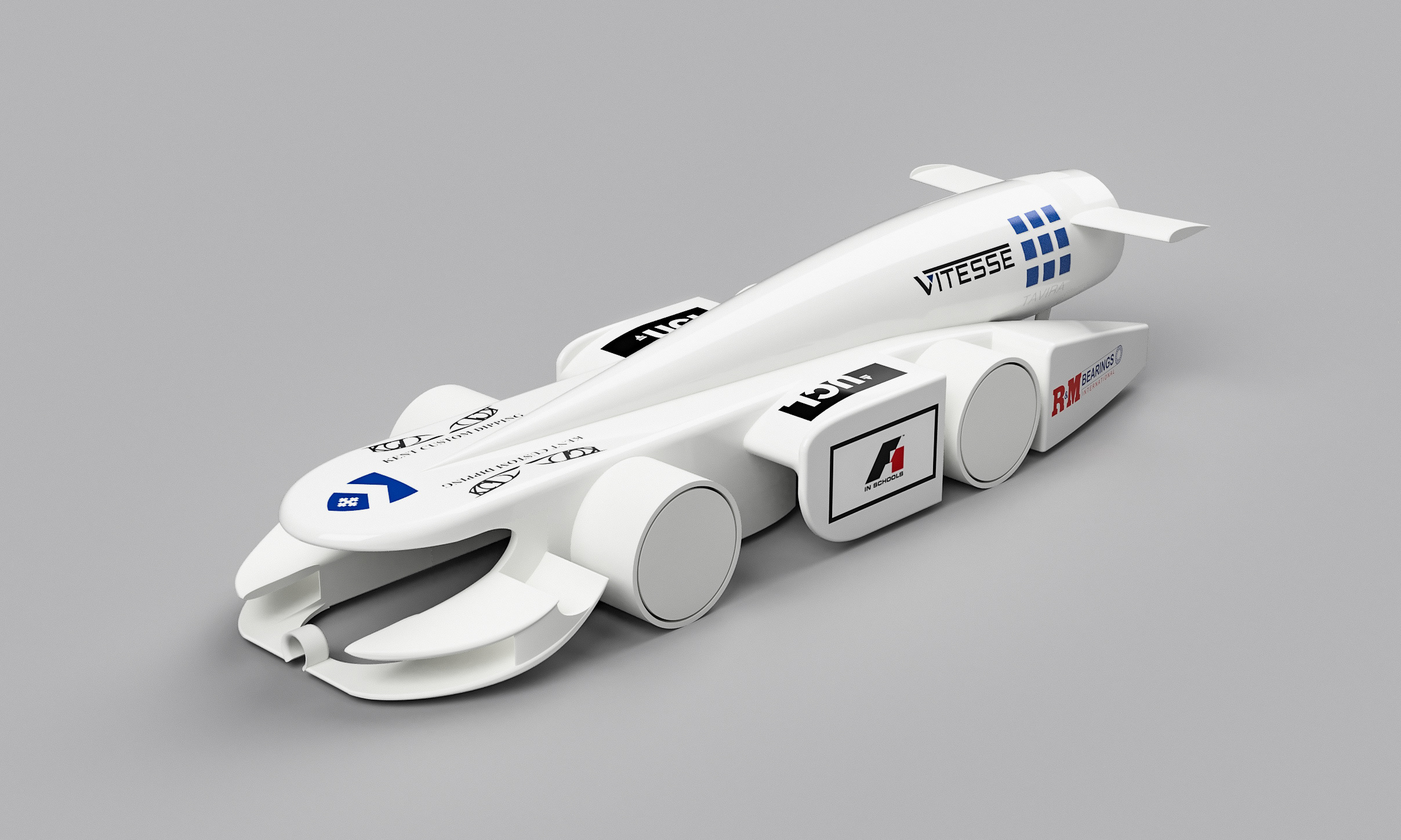
^ Complete aircraft built by a friend using my build guide video. The net is cut out of 4 sheets of A1 foamcore.
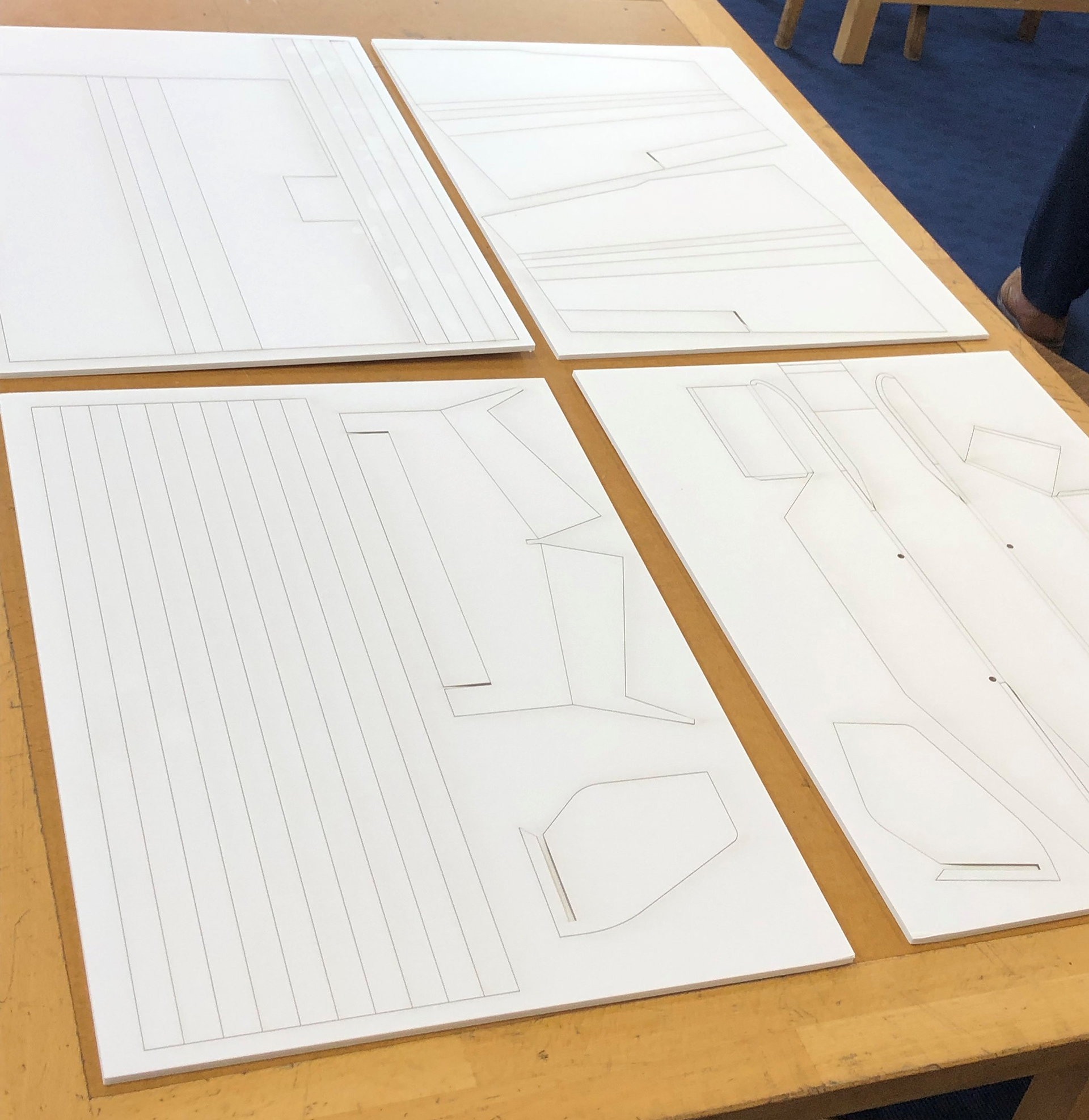

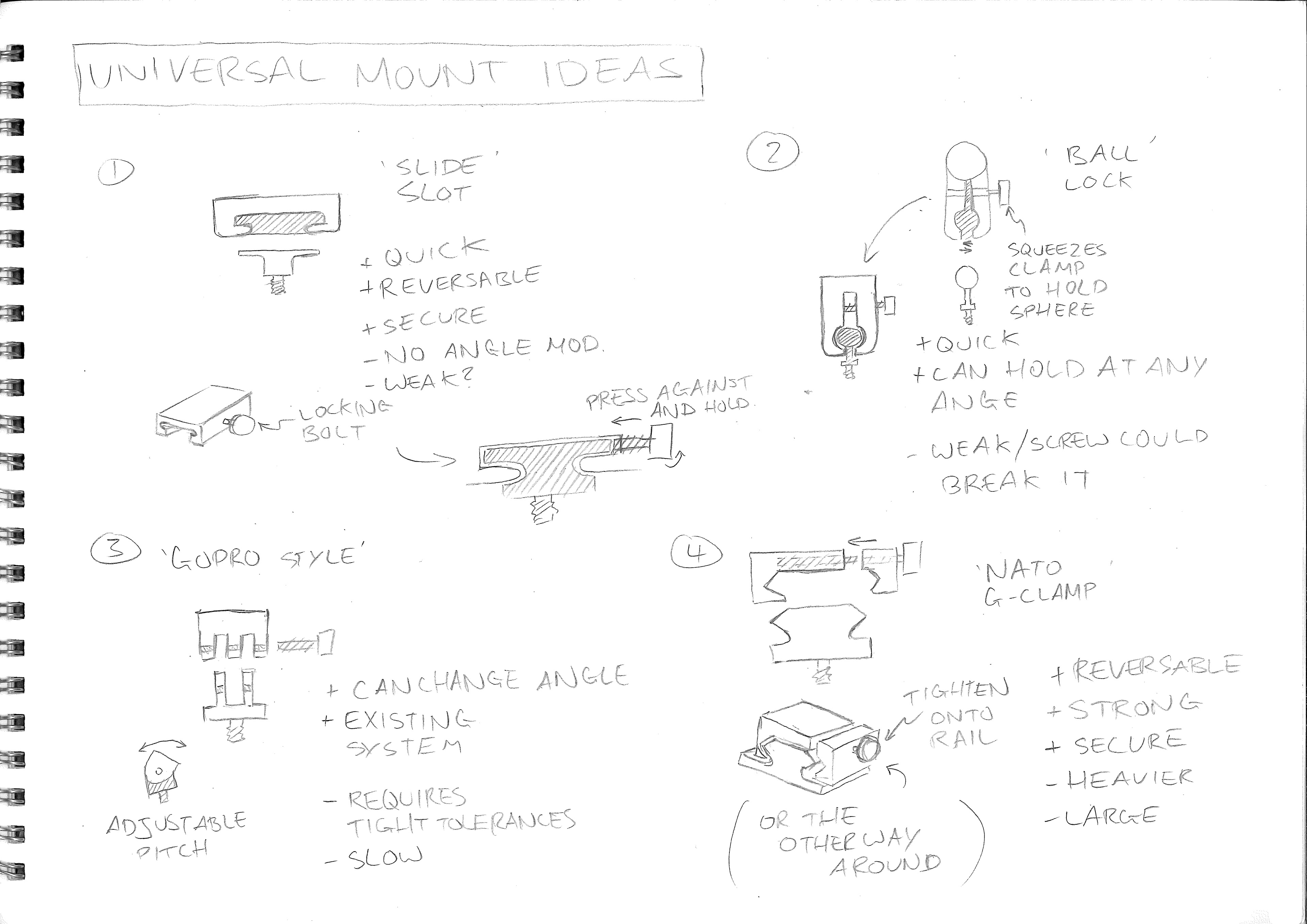
^ Better view of the lay-planned net lasercut in the foamcore. The right image shows how a camera such as a GoPro could be mounted to the NATO rail. The center of mass of the aircraft can be adjusted forwards and backwards.
Test flight
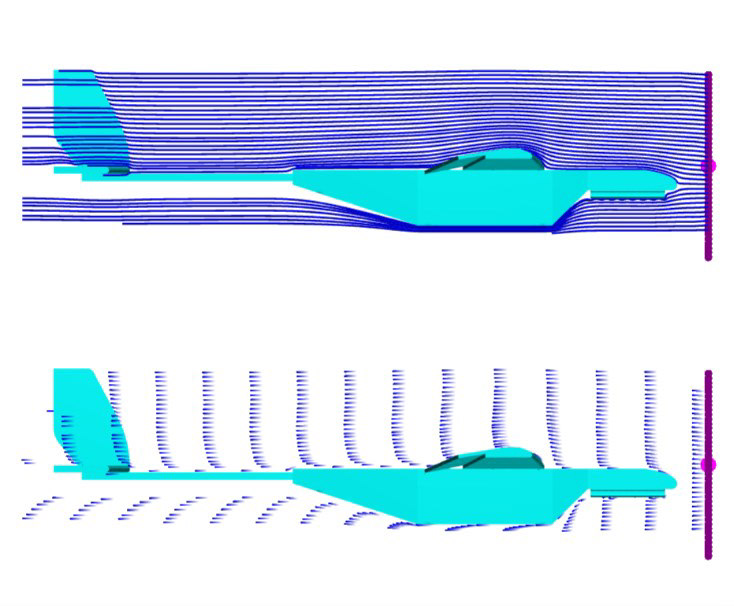
^ Due to a transition period in powered RC flight law, I was unable to fly the aircraft over public spaces, however this unpowered flight shows the stabilization functioning correctly. In hindsight, it may have been slightly overdamped!
Thank you for viewing!